|
👋 Hi! I am Varad Dhat, Currently working as Autonomy Software Engineer at Torc Robotics in Vehicle Intent team. Previously I completed my Master's from the University of Washington, Seattle. I specialize in robotics, focusing on human-robot interaction in mobile robotics, with applications in home robotics, field robotics, and ground autonomy. I was fortunate enough to work as a Research Assistant at the Human-Centered Robotics Lab at Paul G. Allen School of Computer Science & Engineering, where I develop task-based shared autonomy systems to enable seamless and safe human-robot collaboration in dynamic environments. Prior to this, I completed my undergraduate degree at Vishwakarma Institute of Technology. I was part of The Robotics Forum, where I designed and developed semi-autonomous robots from scratch based on specific themes along with a team of 30 for National Robocon_India Aside from robotics, I am a passionate runner and enjoy participating in marathons. Feel free to check out my activities on Strava🏃 |

|
|
|
|
HRI 2024 Best Paper Award in Short Contributions |
|
CoRL 2024 |
|
UIST 2024 |
Experience

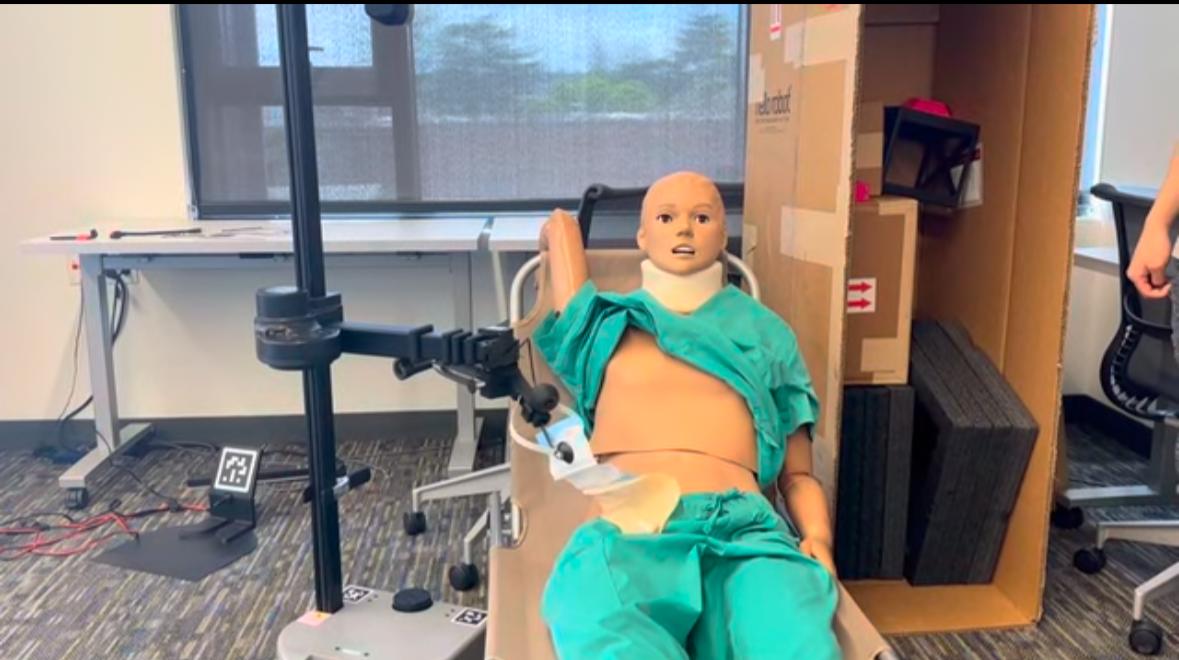
Company: Terraclear Inc
Role: Robotics Software Engineering Intern
Led hardware setup, software development, and testing of an Autonomous Rock Picker. Tuned PID gains, integrated sensors (encoders, INS, LIDAR, RGBD camera), and deployed a vision model using Docker. Developed GPS-based waypoint navigation, enhancing accuracy by 70% and ensuring robust field performance.
Projects

Competitions

Designed and developed semi-autonomous robots for Robocon 2022, implementing computer vision techniques for ball detection and tuning a PD controller for precision. Established reliable communication using WebSocket instead of Bluetooth.
As a clubhead I was responsible for mentoring students, managing inventory of more then $9500Secured All India Rank 5 among 100+ participating teams in National level Robocon 2022
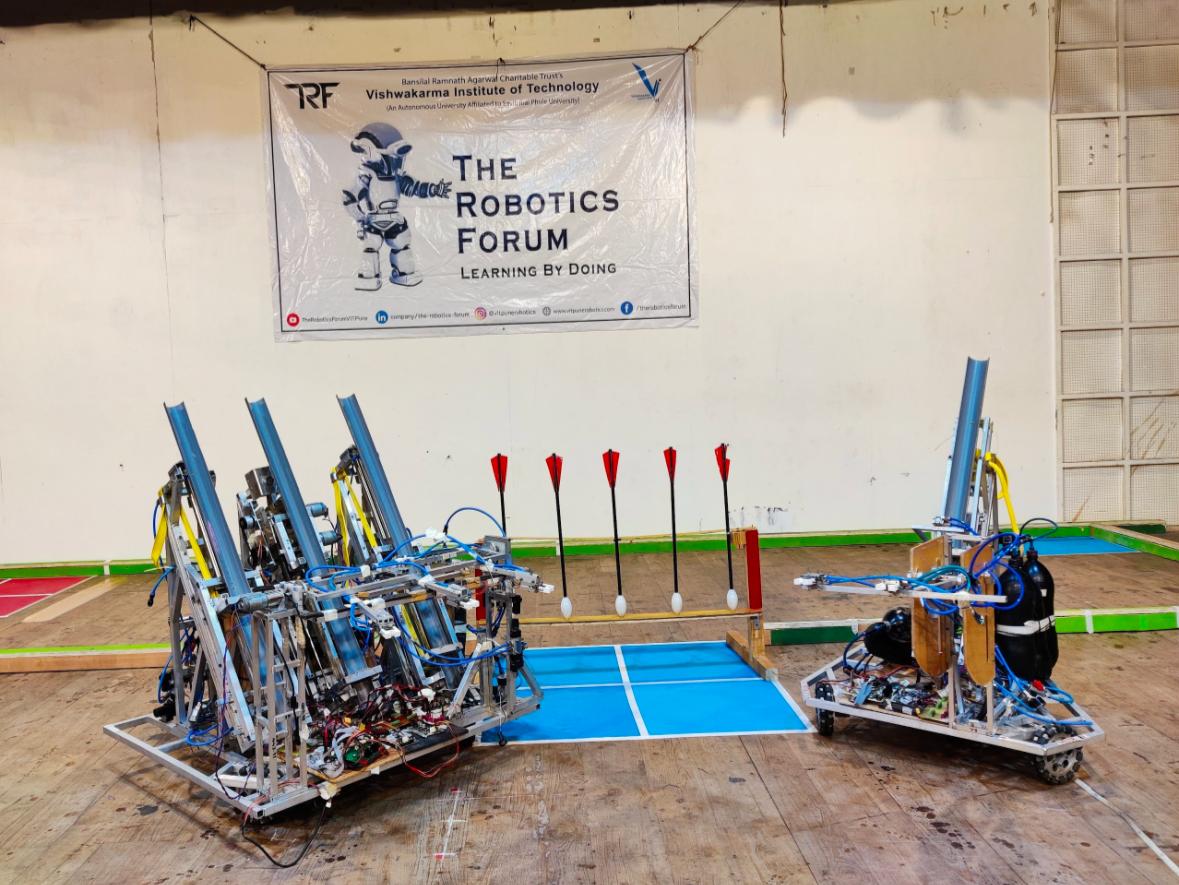
Developed a semi-autonomous robot for Robocon 2021, utilizing a 3-wheeled omni-drive system controlled via IMU and wheel encoders. Gained experience in robot development, including sensor selection, material fabrication, prototyping solutions, and benchmarking for repeatability.Performed design and fabrication of arrow shooting mechanism that enabled picking arrows from ground and rack.
Secured All India Rank 17 among 100+ participating teams in National level Robocon 2021
Report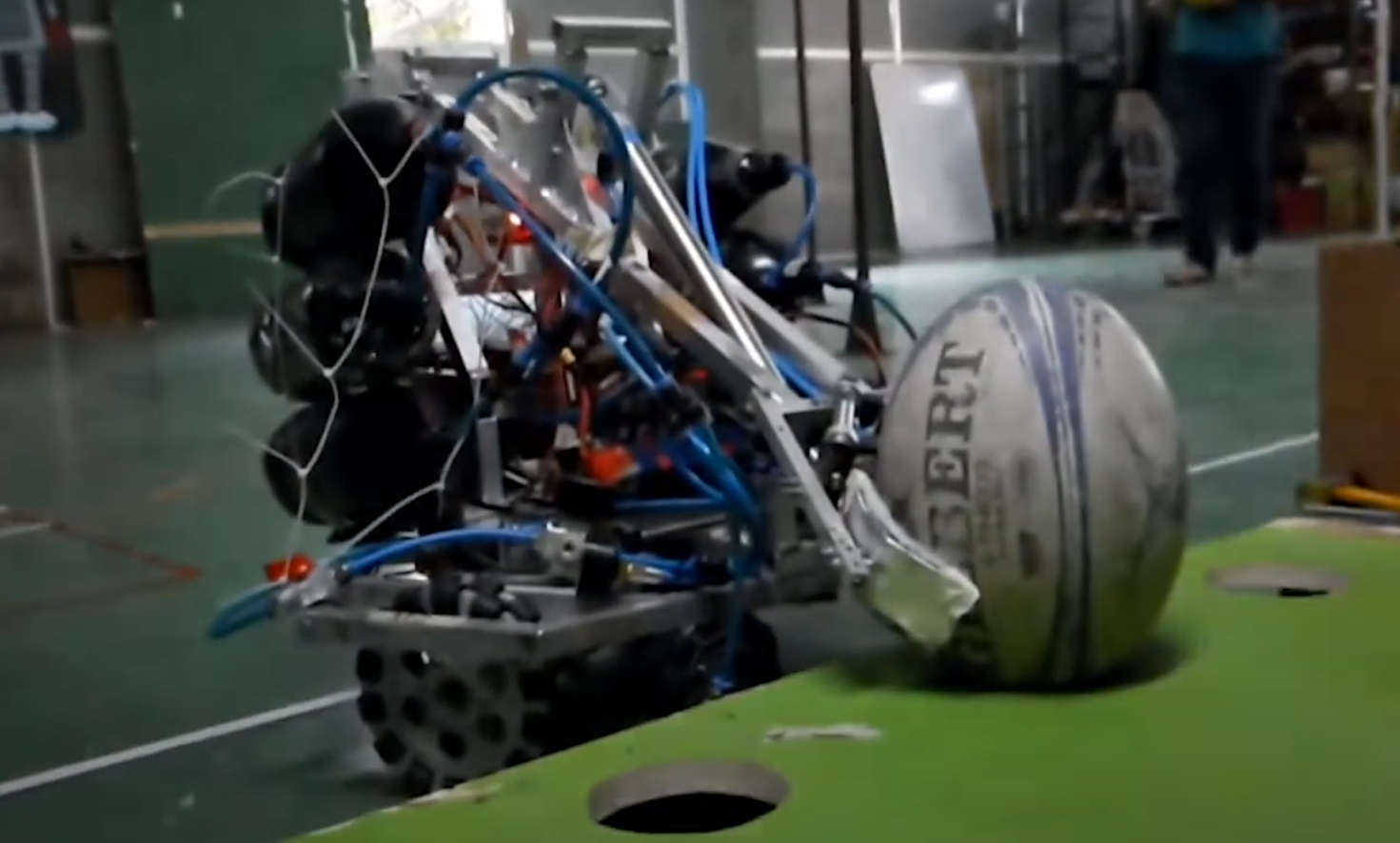
Developed an end-to-end system for Robocon 2020 based on the theme. As a junior team member, my task was to design and develop a ball-picking mechanism and a system to throw the ball over a specific distance. I explored various solutions and implemented a robust method that achieved repeatability, accuracy, and minimized energy losses.
Secured All India Rank 19 among 100+ participating teams in National level Robocon 2020